3.0 指挥系统 complete
索引
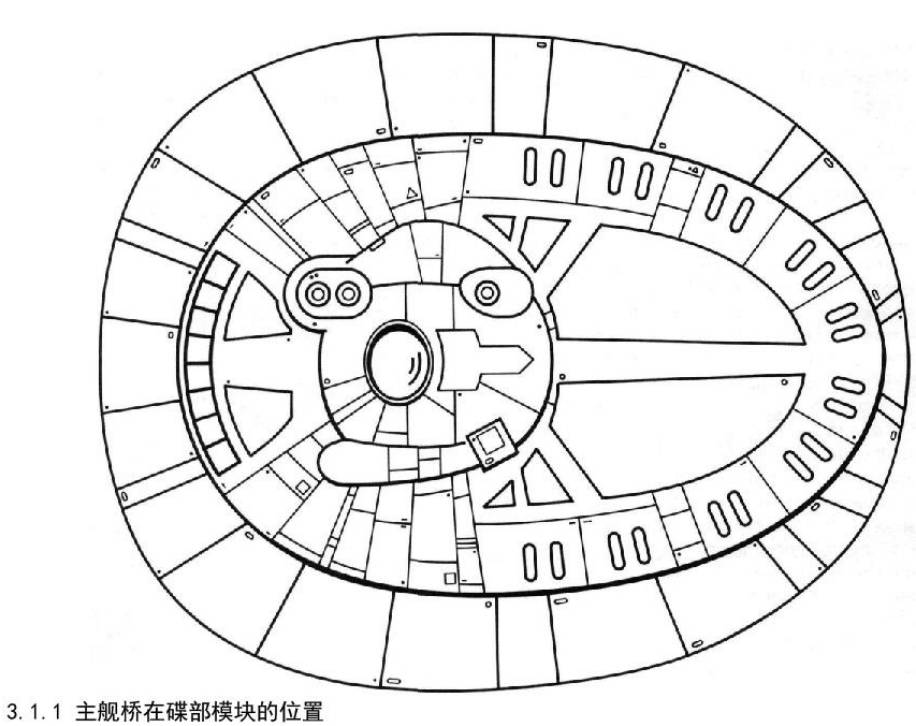
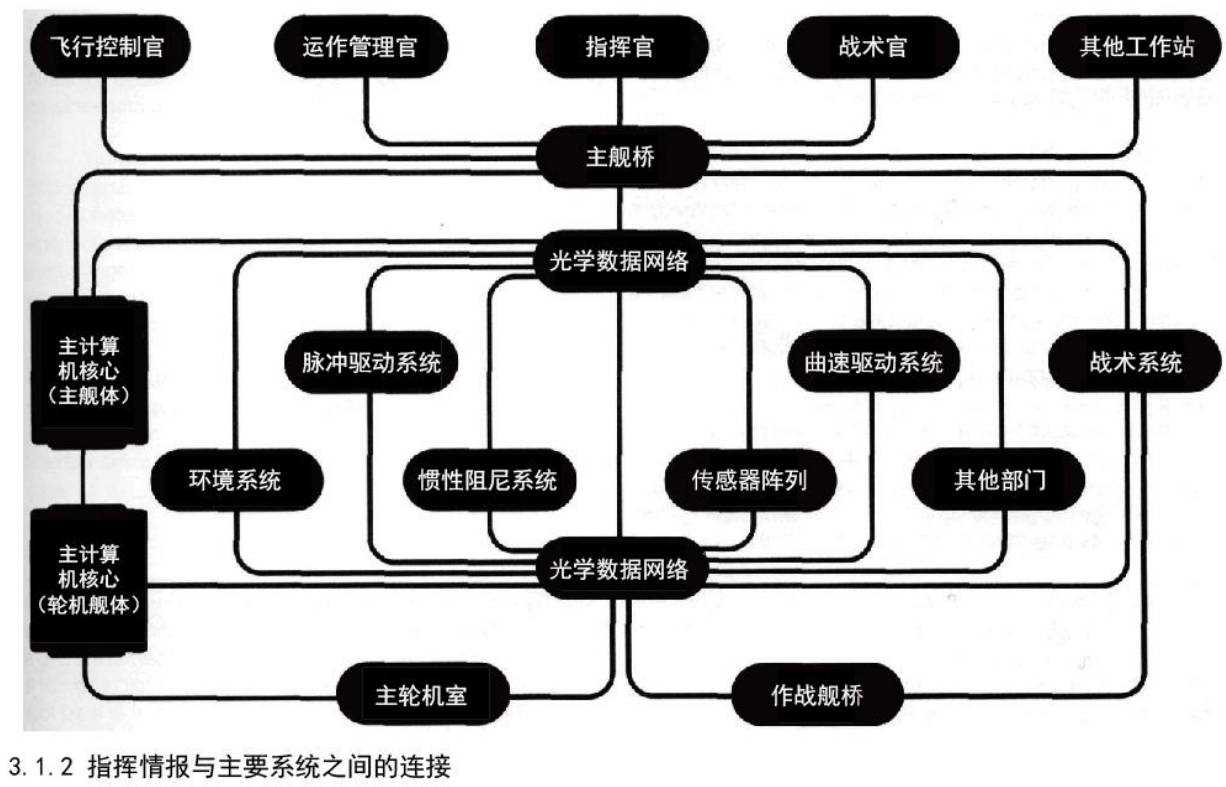
3.1 主舰桥 Main Bridge
银河级星舰的主要操作和控制由主舰桥执行,位于碟部模块最顶部的 1 号甲板上。主舰桥直接监督所有主要任务行动,并协调所有部门活动。
主舰桥的中央区域设置有供当值指挥官及另外两名高级军官所使用的座位及信息显示器。在这一指挥区域的正前方则是运作管理官和飞行控制官(舵手)的站位,并面向主显示器。
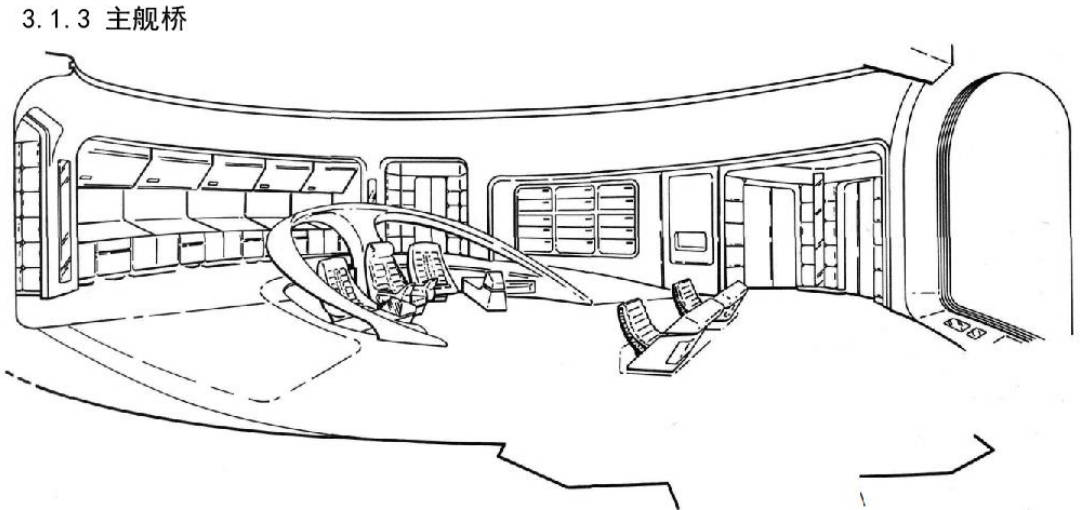
指挥区域的正后方是一个略高的平台,战术控制台就位于此。这一平台上还布置有五个朝向舰艉的工作站,一般统称为后工作站。通常而言,它们的配置分别为一号科学工作站、二号科学工作站、任务运作控制台(简称 Ops)、环境控制台和轮机工作站。舰桥增压舱室的最前方装设有一块大型(4.8×2.5 米)显示器。这一主显示器通常情况下会显示来自某一组前向光学传感器的画面,并可以很容易地重设为显示用于其他视觉观察、信息处理或通讯用途。在通讯情况下,主显示器将从一个专用的子处理器调用数据,能够对几乎任意形式的视觉通讯数据格式进行近实时转换和显示。主显示屏矩阵包括全向全息显示组件,因此可以显示三维全息画面。
后工作站的后方是一个长 3.2 米的设备舱,一般禁止人员进入。这一设备舱内装有舰桥 7 个专用光学计算机子处理器中的 3 个,以及 12 个共享子处理器中的 6 个。此外,这一设备舱还设置有数组电力、环控和光学数据总线接口。除上述之外的其他计算机处理器则安装在较小的机柜内部,这些机柜分布在后工作站内、指挥区域左右侧舱壁内,以及运作/操舵工作站与主显示器之间的甲板之下。
除主舰桥之外,1 号甲板上的其余设施包括舰长待命室与盥洗室、后观察廊,以及与舰桥相连的船员盥洗室。舰桥和舰长待命室内都设置了食物复制机终端。
通往舰桥的主要连接包括两条标准涡轮电梯竖井,一条应急涡轮电梯,以及四条等离子电力系统配电波导管。其他连接包括四组环控系统支持通风组件,9 组主份与 2 组备份光学数据网络总线,两条复制机系统波导管,以及三条维护走道。
由于主舰桥系统的重要性,尤其是在紧急情况下,因此主舰桥被指定为应急环境支持避难所之一。其从两组特别保护的公用系统总线获取高优先度维生系统资源支持,能够确保即便在主份和备份环控系统均失效的情况下仍维持最长达 72 小时的 M 级大气环境。此外,舰桥模块壳体内部还设置有两组紧急大气与电源供给模块,每一组都能在其他任何系统全部失效的情况下继续为舰桥提供长达 24 小时的大气和照明供应。
主舰桥模块通过 320 根 7.2 厘米直径的硬铀紧固杆连接在船体龙骨框架上,从而在主要星站停留期间可以被取下并更换整个舰桥模块。一系列 17 毫米厚的 AGP 半弹性陶瓷垫片作为结构间的连接件,同时也提供震动阻尼和消除扭矩。主舰桥结构壳体由交错编织的微发泡硬铀纤维丝缠绕成型,并伽马焊接在船体结构的三钛合金桁架上。内层环境包络层由低密度膨胀陶瓷聚合物复合材料分段组成,提供隔热与气密性。
在原型舰银河号的早期适航性测试中,标准的银河级舰桥模块尚未完全可用。因此,此时安装的是一个专用的试航舰桥模块,其拥有独立的维生系统和亚光速机动能力,并在试航期间作为试航乘组的自持封闭居住舱室。若测试期间飞船或推进系统出现重大故障,舰桥模块便可载着乘员整体弹射并脱离到安全地带。
预计银河级当前采用的舰桥构型在未来数年内都不需要进行较大变动。当前的计划是每年对舰桥及其控制系统进行设计评估,并在预定的 20 年周期大修期间进行主要系统的更换。
作者注
进取号-D 的舰桥是《星际迷航:下一代》最早设计的场景之一。它最初由安德鲁·普罗伯特设计,然后在制片设计师赫尔曼·齐默曼的指导下完成设计并建造出来。工作蓝图由布景设计师勒斯· 高布鲁齐起草。从第二季开始,包括进取号的内饰在内的布景设计转由制片设计师理查德·詹姆斯指导,他曾作为《天父的罪》( Sins of the Father )的艺术指导荣获艾美奖。可更换舰桥模块的概念起源于《星际迷航 V 》,当时我们和赫尔曼·齐默曼一同在设计新的进取号舰桥,而这个舰桥看起来和《星际迷航 IV 》时的舰桥看起来有很大区别。于是我们就打算这样解释:这是因为舰桥设置在碟部顶部,设计作为一个可插拔模块,能够很方便地进行更换。这样就能让星舰的控制系统很容易得到升级,从而延长她们的可用寿命,也更易于根据特定的任务需求设置星舰构型。这一概念也与我们已经在剧中看到过的至少四种不同的米兰达级星舰相印证,分别是信望号[ USS Reliant ](出现于《星际迷航 II 》)、萨拉托加号[ USS Saratoga ](出现于《星际迷航 IV 》)、兰特尔号[ USS Lantree ](出现于 TNG 剧集「Night Terrors」)和布拉顿号[ USS Brattain ](出现于 TNG 剧集「Night Terrors」),她们都有着各不相同的舰桥模块。
3.2 舰桥运作 Bridge Operations
星舰的操作权限属于指挥官(通常是舰长或者值班军官)。指挥官负责执行星际舰队的命令和政策,以及解释和遵守联邦法律和外交准则。也就是说,指挥官直接对星际舰队司令部负责,负责确保星舰的正常性能表现。
主舰桥直接负责监管所有主要任务职能,同时还通过运作管理官监管着所有次要任务职能的运作,以确保最佳工作状态。进取号作为多用途星舰的任务属性,意味着需要不同部门间的大量协调才能确保正常运作。
主舰桥也在星舰处于警戒状态或者危机情况时担当指挥中心。在舰碟分离状态下,战斗部分(即轮机舰体)由作战舰桥管理,碟部模块的控制则由主舰桥完成。这时,通常将由舰长和高级军官组指挥战斗模块,由指定的初级军官负责碟部模块。
不同警戒状态下的舰桥运作 Bridge Operations During Alert Conditions
- 巡航模式:此即星舰的常规运作状态。巡航模式的操作规则规定,舰桥乘员组至少应由指挥官(通常为舰长)、飞行控制官、运作管理官和至少一名可根据需要来操作战术控制台或其他工作站的军官组成。根据任务需要也可向其他工作站派更多人员。(详见 条目 15.4 )
- 黄色警戒:在黄色警戒状态下,所有工作状态的舰桥工作站都会自动切换为全能模式,同时在所有主要和战术系统上自动运行 4 级系统诊断自检。运作官将负责评估所有当前行动和舰上活动,并中止任何可能影响舰船对危机局势做出准备和响应的活动。(详见 条目 15.5 )
- 红色警戒:在红色警戒状态下,所有舰桥工作站都将自动启动并切换为全能模式。战术系统将进入完全戒备状态,并且若舰桥战术工作站缺席,则当值安全官将立即接管。(详见 条目 15.6 )
3.3 基本控制面板/终端嵌入式操作系统 Basic Control Panel/Terminal OSE
进取号上的显示/控制面板采用了软件定义界面,能够连续更新和重构,以获得最大操作效率且易于使用。每块面板都与一个当地子处理器绑定,后者持续监控面板活动,并与预定义的场景和操作程序相比较。这样的设计允许计算机持续更新面板配置,从而为操作人员提供最相关的行动选项菜单。若操作人员偏好,这一配置也能够给他/她提供充分的信息及定义和执行非预编程指令的灵活能力。
显示界面的布局设计用于将相关功能与操作流程按最大程度上符合直觉和逻辑的方式分组。搭载的计算机数据库访问与读取系统(Library Computer Access and Retrieval System , LCARS) 软件会持续监控操作活动,并由此不断重构显示界面,从而为操作人员呈现对于特定形势而言最常用的相关选择路径。LCARS 系统也能为操作人员提供完全的信息显示(具体有多完全将取决于操作人员或运作规程所选择的级别),让其能够执行其他任何合法操作。
大多数面板都被设置为能够接受语音输入,尽管大多数情况下更倾向于使用触摸键盘输入,因其输入速度更快,也没有语音识别算法经常引发的误读导致的输入错误问题。
巡航模式运作规程允许任何船员为自己的工作站定义个性化界面配置,这意味着船员可以自由调节界面布局和程序菜单来适应自己的工作风格和训练水平。如果出现譬如最近系统刚刚安装了新的软件升级、但当值军官还没受训过使用新系统布局这样的情况,面板控制软件通常可以被设定为模拟历史版本的配置,直到操作人员取得认证。标准布局在任何时候都可被唤起,且在警戒情况下,所有面板都将自动切换到全能布局。
控制/显示面板 Control/Display Panels
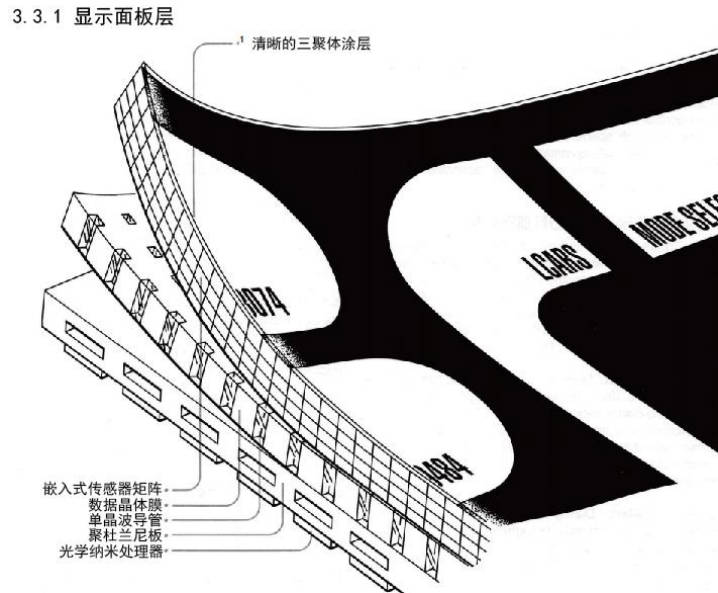 控制/显示界面由三层基本层组成。最外层由 2.5 毫米厚的三聚体涂层透明铝片制成,内部埋入有传感器矩阵,用于探测触摸输入。这一层还包括有另一层换能器矩阵,用于为操作人员提供触觉和听觉反馈,以指示输入操作是否被触发。
控制/显示界面由三层基本层组成。最外层由 2.5 毫米厚的三聚体涂层透明铝片制成,内部埋入有传感器矩阵,用于探测触摸输入。这一层还包括有另一层换能器矩阵,用于为操作人员提供触觉和听觉反馈,以指示输入操作是否被触发。 下一层为高分辨率图形显示介质层,由铝表面晶圆片以化学方式粘结在三轴光学显示晶体膜上组成。内部间隔 1.8 毫米穿插的单晶微波波导管用于向上一层的传感器与换能器矩阵供能。
控制界面的基底层由微发泡聚硬铀板制造,用于支撑显示屏组件。这一层还整合了光学数据微处理器矩阵,可由当地处理器寻址并初始化显示界面的自重构。出于冗余考虑,面板的微处理器单元内囊括有足够数量的非易失性存储器,使其即便在主计算机无法支持的情况下也能正常执行系统操作。
作者注
迈克花了相当多的时间来设计一个图形化的「用户界面」,这是舰上各种控制面板的设计基础。他的设计目标是创造一种视觉风格,这种风格提倡用极其简单的操作方式来组织和控制本身极其复杂的进程和硬件。还有,如果你们对我们的摄影棚里使用的实际面板进行更仔细的检查,就会发现许多按钮和指示器上都标有《星际迷航》摄制组成员姓名的首字母。(不用太把这事当真——因为它们太小了,在电视上根本看不出来的。)
我们将软件可定义、任务专用面板布局的概念融入到我们的控制台当中,因为迈克认为这是一种逻辑上的简化设计的方法,否则设计会变得非常复杂。这一基本想法就是,面板会自动重新配置自己,以适应手头的特定任务。我们发现这样做还有一个额外的好处——这样能够给我们的演员更多的自由来点击控制台来完成各种任务操作。(尽管我们的演员总会尽可能把事情做好,但在很多情况下,一个特定的镜头需要演员按下面板特定区域的按钮,而实际上在最初设计中这些按钮并不是现在需要的功能。)如果使用了可变布局控制面板,这个星期发射相位炮的按钮和下个星期发射相位炮的按钮可能就不是同一个了。
3.4 飞行控制台(舰舵) Flight Control(CONN)
飞行控制台,通常也被称为操舵控制台或舰舵(Conn),负责对星舰的实际驾驶和导航控制。尽管这一职责的自动化程度很高,但其的重要性仍然需要一名人类船员时刻对其操作进行监管。飞行控制官(通常也被称为舵手)会从当值指挥官处直接接受命令。飞行控制官的职责主要有以下五点:
- 导航参考/航线标绘
- 监管自动飞行操作
- 手动飞行操作
- 确认星舰所处位置
- 确保舰桥与轮机室的联系
在脉冲推进飞行中,舵手负责监控相对论效应的影响,以及 IDF 系统的状态。如果需要进行的机动超出了 IDF 的安全容量,计算机会请求舵手手动调整机动程序,以确保机动不超出星舰的可用性能包线。在警戒情况下,飞行规则则允许舵手进行可能会对飞船或乘员造成潜在危险的特定包线外机动。曲速飞行运作规则要求舵手和轮机室并行监测子空间场的几何状态。在曲速飞行中,飞行控制台会不断更新远程传感器数据并进行自动航向校正,以适应星际介质密度的微小变化等情况。
由于飞控操作对于飞船而言尤其是在紧急情况下的重要性,操舵控制台与专用的备用飞控子处理器直接连通,以确保紧急情况下的手动操舰能力。一同连通的应急系统套件还包括紧急导航传感器。
具体职责 Specific Duties
- 导航参考/航线标绘:飞行控制台会显示来自导航与战术传感器的数据,并叠加当前及预计/计划航线数据。舵手能够访问来自次级导航传感器和科学传感器的数据,并对主传感器数据进行验证和校准。上述交叉检查也在每次换班和激活警戒状态时自动执行。
- 手动飞行操作:飞控指令的实际执行通常由计算机控制来完成,但舵手也有人工超控导航和飞控功能执行全手动控制的选项。在全手动模式下,舵手可以在字面意义上直接使用键盘输入来控制星舰机动。
- 反作用力控制系统(RCS):尽管 RCS 系统的实际推进矢量和点火程序控制通常都是完全自动化的,但舵手也同样可以完全人工控制 RCS 推力器系统,精确到某一指定的推力器单元。
舵手同时也扮演与轮机部门进行联系的角色,因为他/她在操舵的同时也要负责监控推进系统状态。在舰桥上没有轮机人员当值的情况下,他/她也要负责向指挥官提供系统状态报告。
飞行信息输入 Flight Information Input
共有五种标准输入模式可用于指定星舰的飞行路径,均可以使用键盘或语音指令输入。在每一种模式下,飞控软件都将自动确定满足星际舰队航行和安全规章的最佳路线。舵手可以选择直接执行,也可以人工修改其中的任一参数以满足任务需求。这五个标准输入模式分别是:
- 指定目标行星或恒星系统:导航数据库中的任何天体都可以作为目的地,但若目的地超出星舰当前可用的行动半径时系统将警告舵手。数据库内的具体设施(例如轨道空间站)也是可接受的目的地指定。
- 指定目标星区:星区标识编号和星区常用名都是有效的目的地坐标。如果没有进一步指定星区内的具体目的地,飞行航线将默认星区的几何中心为目的地。
- 拦截飞船:舵手需要指定一个已经被战术传感器锁定的目标飞船作为目标,同时还需要指定相对接近速度或拦截时间以确定星舰的截击速度。也可以直接指定某一曲速航速。导航软件将会根据指定速度和目标飞船航线的战术投影来确定最优拦截航线。此模式有多种变体可供战斗情况时使用。
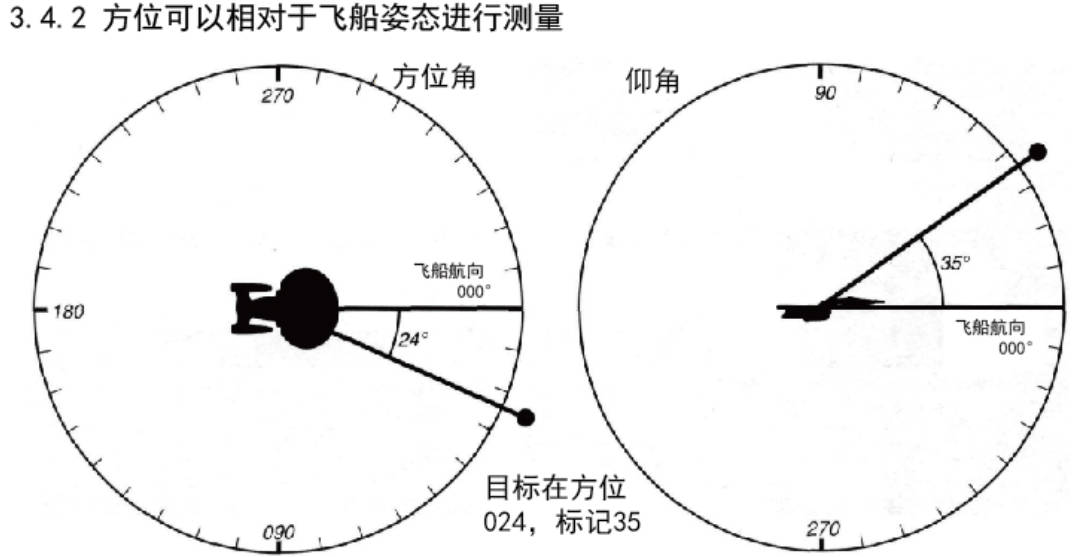
- 指定相对方位:飞行矢量可以指定为相对飞船当前方向的方位角/仰角。在这种情况下,000-标记 0 表示指向正前方的矢量。
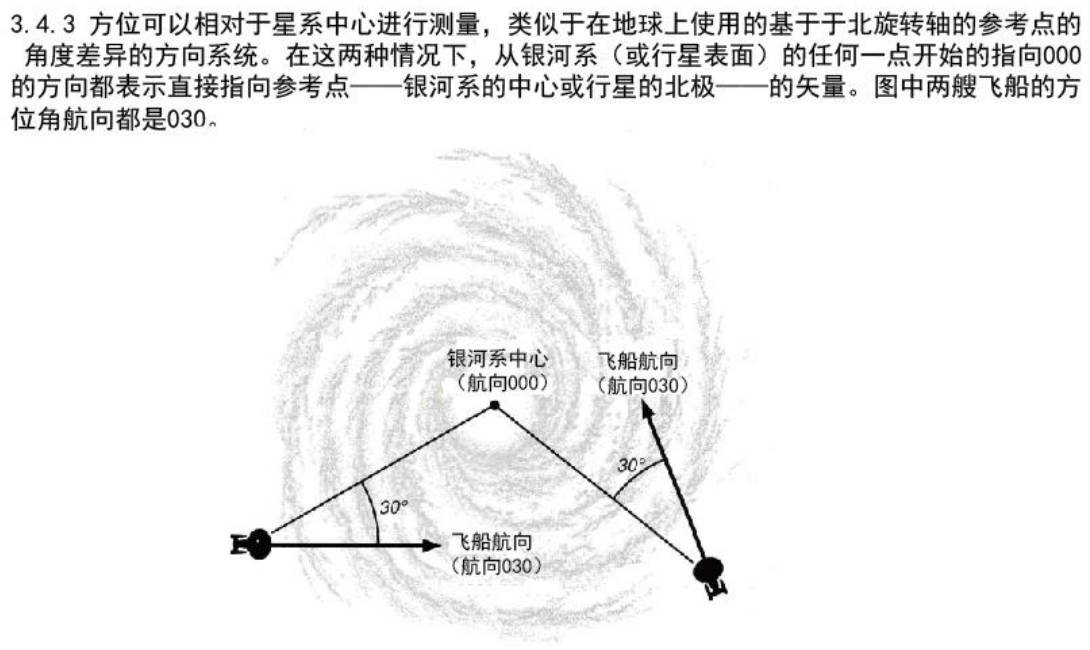
- 指定绝对方位:飞行矢量也可以指定为相对银心的方位角/仰角。在这种情况下,000-标记 0 表示指向银心的矢量。
- 指定银河坐标:标准银河三维坐标也可作为有效的目的地输入,不过大多数船员都认为这种导航方式十分繁琐。
作者注
大多数的控制面板和显示屏都是由迈克·奥田和查理·托马斯使用 Adobe Illustrator 和传统的钢笔画技术设计出来的大幅摄影幻灯片。这些巨大的胶片被装裱在有机玻璃片上,并在迪克·布朗菲尔德的监督下,由《星际迷航》机械特效部用电子闪光灯进行背光处理。最终得到的结果是一个看起来非常清晰且「高科技」的面板。如果需要近距离观看某个面板时,迈克通常会在他的麦金塔 II 电脑上使用 Macromind Director、Pixel Paint 和 Swivel 3D 等程序来制作面板显示动画。做好的显示动画会直接使用光栅操作板记录在录像带上,视觉效果部门则负责在后期制作中将做好的动画叠加到控制面板上
3.5 运作管理控制台 Operations Management (OPS)
许多舰上的操作都会涉及调度资源或硬件设备(例如能源供给或调用传感器),这些资源和硬件设备的调度情况会影响许多部门。 在这样的情况下,往往会出现许多行动引致互相冲突的需求的情况。运作管理官(通常被称为运作官或 Ops )的职责便是协调这些活 动,以确保不会危及任务目标。有一名船员参与这样的决策循环而非全权交给计算机来决定是至关重要的,因为星舰必须要应对各种 不可预知的情况。
运作控制台的面板会将当前的主要舰上活动列表不断更新并显示给运作官,运作官需要根据列表对目前的行动确定优先次序并协 调资源分配。当出现两项或者更多的请求都要求使用同一个设备、互相冲突的任务程序,或是需要考虑某些不常见的安全或战术需求 时,运作官的协调能力就显得尤为重要。
例如,恒星物理学部门正在使用侧向传感器阵列对附近的一个双星系统进行研究,同时侧向传感器阵列也被一项远程彗星编目勘 测项目所部分使用。此时如果舰桥发出需求要对某个行星系统进行优先扫描,可能就会让两项任务都受到影响。此时运作官就可以通 过各种手段来协调不同的资源需求,比如对星舰的姿态进行小幅调整,从而让顶部传感器阵列转到可供恒星物理学部门使用的位置。 同样,运作官也可能经权衡决定将这两项研究中的任一项或两项都放到较低优先级,并让舰桥立即优先使用侧向传感器阵列。
优先级和资源分配 Priority and Resource Allocation
大多数常规调度和资源分配都是由运作管理程序自动完成的,这样能够让运作管理官从例行活动中解脱出来,更专注于人工智能软件能力范围之外的决策。这些决策筛选程序的筛选级别可以由运作管理官设置,也可以随星舰当前处于的不同警戒状态而变化。
在优先次序不明或者需要运作官进行具体核查的情况下,操作台面板会将最可能采取的行动选项菜单显示出来。同时,在任何情况下,运作官都可以输入除菜单之外的其他选项。考虑到任务规划程序不可能预见到每一种可能的情况,这一能力当然非常重要。操作官也可以通过键盘输入指令,要求行动菜单显示任何当前正在进行的活动(包括那些常规情况下将被自动过滤处理的活动)。
在危机情况和低能耗运作模式下,运作管理官被赋予与轮机部门协调以监管能源分配情况的职能(详见 条目 15.9 )。在这种情况下,需要基于飞船的生存因素和任务优先级决定负载分配和关闭不必要的电源供应。
运作管理官还负责向主计算机提交常规状态信息,这将在随后分发给所有部门和人员。运作管理官也会对特定部门传达特定信息,以提醒他们预计可能会对其工作造成影响的变化和需求。
下面以此场景举例:一支外勤队被送往一个星球表面执行任务。典型的运作官职责将可能包括:
- 通知外勤队员他们的部署,并提供任务简报。当外勤队人员是从其他任务部门调来时,运作官有时也需要从其他部门调来经交叉履职培训的人员顶班。
- 与任务运作官互相协调,分配通讯中继频率并准备监视外勤队的三录仪遥测数据。
- 发布三录仪、相位枪、环境防护服和其他特定任务装备的装备通知。
- 指派人员传送室进行传送作业,并指派一名传送主管参与任务。如果需要,运作官还要和传送主管进行传送工作协调。
- 通知轮机室准备为传送作业分配能源,并在必要时关闭护盾。
这类通知一般是自动完成的,不需要运作官主动干预。但是,由于不能期望预处理程序功能能够准确预见所有可能的情况,运作官还是需要负责监测所有的此类协调活动并在必要时采取额外的行动。在警戒或危机情况时这种灵活处理尤其重要,因为在这种情况下常常需要处理不可预测或者计划之外的情况。
3.6 战术控制台 Tactical
战术控制台在主舰桥上占据专有的位置,用于控制星舰防御系统、以及管理星舰内部安全工作。就目前在进取号上的布局而言,战术控制台在整个指挥环境中占有独特的位置,直接位于中央指挥区域和后工作站之间。
战术工作站的位置凸起于舰桥地板,其外形呈一条后掠的弧线,让战术官能够不受遮挡地看到主显示器,同时也能清楚地看到下方的指挥工作站。这样的布置使得在关键行动期间,安全官(兼任首席战术官)和其他舰桥军官之间、以及和后工作站的船员之间都能保持不受阻碍的交流。工作站没有座椅,取而代之的是战术官处于站立位置,这被认为是对于安保职能而言更高效的人体工程学设计。尽管工作站的显控面板尺寸可以允许两人同时工作,但大部分场景下安全官都是单人值守。这是因为在危机情况下,当处于最高行动等级时,只有一名战术官意味着需要的指令确认和命令协调工作最少,从而能够更快更准确地做出反应。不过第二名战术官也会时刻待命,以备在主任战术官需要离岗执行其他任务或是因身体不适等原因无法履职的必要情况下接管。
舰上安保职能 Shipboard Security Functions
默认控制面板的一部分布局如图 3.6.1 所示,能够向安全官提供与进取号船内及其乘员安保工作相关的信息。第一层安保措施包括一种较为良性的、低水平的方式,对乘员的基本安全进行监管。第二层安保措施会在外交和文化活动期间启用,提供对大使和其他要员的安保防护。作为对上述设施的补充,高级别反间谍/情报措施也可以按需启用,用于消除进取号上可能发生的破坏或恐怖主义渗透行动。
星舰防御职能 Starship Defense Functions
在高危环境中执行任务,譬如接近高能天体、处置人工建筑物造成的危险、以及来自敌方舰船的潜在威胁时,星舰的生存往往将取决于安全官的表现。安全官能够使用战术工作站控制星舰的所有一线防御措施,包括偏导护盾、相位阵列和光子鱼雷等。(详见 条目 11.0 )
在需要处理外部威胁的情况下,战术工作站和战术官将会与操舵工作站和飞行控制官进行协调。制导与导航信息、目标数据和外部通讯信息会在三个工作站间进行交联传输,从而为处置威胁提供更多的选择。
在其他情况下战术工作站可能控制的系统还包括远程与近程传感器阵列,探测器,通讯浮标和牵引光束。
3.7 指挥工作站 Command Stations
主舰桥的指挥工作站为指挥官(通常为舰长)和另外两名军官(通常为大副和顾问)提供座椅和信息显示。指挥工作站位于舰桥的中心位置,其设计旨在确保所有舰桥关键人员间的沟通效率最大化,同时让指挥人员能够不受遮挡地观察主显示器。
舰长椅的扶手整合了小型状态显示面板,以及简化的操舵和运作控制面板。舰长可以通过键盘或语音指令输入,借助这些面板来越权进行基本的星舰控制。这样的越权控制通常只用于紧急情况。指挥区的另外两个坐席则配备了面积更大的信息显示终端屏幕,供这两名军官执行他们职责的一部分:访问和整理数据。
巡航模式运作规程要求任何时候都必须有一名换班指挥官当值,其他指挥人员的在场则视任务需要决定。红色和黄色警戒运作规程则要求舰桥上除舵手与运作官之外,还必须有至少两名指挥官当值。
3.8 科学工作站 Science Stations
一号科学工作站和二号科学工作站是后工作站中的头两个,位于舰桥上层、战术工作站的正后方,用于供舰桥人员向指挥官提供实时科学数据分析。这些工作站平时并不指派全职技术人员当值,但可以按需启用。
在某些情况下,科学工作站供属于次要任务的人员使用,包括研究人员、科学官、任务专家和其他需要与舰桥紧密协调行动的人员。一个典型的例子是进行恒星成分研究,虽然该研究通常是在恒星光谱实验室进行,但偶尔也需要进行大面积观测,此时在舰桥上会更易于管控。另一个例子则是控制自主探测器在危险区域收集星际尘埃样本,回收探测器需要飞船进行对应的特定机动,因此也需要在舰桥上进行。
两个科学工作站通常配置为彼此独立运行,但如果两个站上的研究人员希望合作工作,它们也可以相互连接。科学工作站与操舵控制台、运作控制台和战术控制台之间建立有优先链接。在警戒状态期间,如果有必要,在经运作官批准之后科学工作站可以优先访问传感器阵列,覆盖正在进行的科学部门观测和其他次要任务。
一号科学工作站还设有一块等线性芯片矩阵插板,能够用于按需装载任务所需程序,或是供研究人员快速采集数据留待后续进一步研究。
科学工作站职能 Science Station Functions
科学工作站的主要职能包括:
- 为主要任务和指挥情报需求提供传感器访问和解析软件支持,并作为运作官的补充提供实时科学数据供指挥官进行决策;
- 担任协调不同实验室及其他部门活动的指挥中心,同时监控次要任务状态;
- 根据特定的指挥情报需求随时重构并重校准传感器系统。
3.9 任务运作控制台 Mission Ops
后工作站中的第三个是任务运作工作站。这一工作站负责提供对主运作管理官的额外支援,并负责监视与次要任务相关的活动。在这种情况下,任务运作官将作为运作管理官的助手,帮助他/她分担需要有人监视但优先级较低的任务职责。
任务运作官还负责根据运作官的指示及操作规程分配资源和权限。例如,运作官可能决定某一项特定的研究任务能够在舰桥不使用某些特定传感器元件的情况下优先使用它们。尽管实际上的资源分配将是由运作工作站软件以精确到分钟的频率自动进行的,但任务运作官仍要监视计算机活动,以确保自动控制不会对任何任务的优先级做出过度妥协。在不可预见的情况往往超出预编程决策软件的预期应对范围时,这种能力尤其重要。
任务运作官负责处理低级别的优先级冲突,但大部分情况下主要任务的冲突仍然会交由运作管理官进行处理。
此外,当当值运作官不在岗时,任务运作官通常也会作为后备人员接替。
其他任务运作官职责 Other Mission Ops Duties
任务运作控制台负责在进行主要任务时监测外勤队的遥测数据,包括三录仪和其他特定任务设备的数据。
任务运作官还负责监测次要任务的活动,预测其需求和可能发生的优先级冲突并进行处理。如果这类优先级冲突会影响到进行中的主要任务,任务运作官需要通知运作管理官。
在警戒状态和危机情况下,任务运作官还需要协助安全官,向其提供外勤队和次要任务的信息,并告知安全官这些活动对安全问题可能产生的影响。
3.10 环境控制台 Environment
环境工作站用于监视与控制进取号上的维生环控系统。尽管由于这些系统的高度自动化这一站点在正常情况下很少有人值守,但在危机和警戒情况下它将变得至关重要。
这一工作站通常设置用于监测大气、温度、重力、惯性阻尼和护盾系统的状态和性能。此外,环境工作站还对用于循环回收大气、水、食物及其他消耗品的多套回收循环与再处理系统进行监管,以确保生态系统的正常循环。如果工作站无人值守,则程序会在出现任何需要注意的情况时提醒运作官。
在警戒及危机情况下,环境工作站将作为辅助运作管理工作站,负责监测与分配维生系统资源以最大化乘员的生存能力。环境系统控制官(当舰桥需要其值班时)拥有在环控系统故障的情况下触发黄色和红色警戒的权限,并负责在各种紧急生存情况下组织和执行疏散工作。
3.11 轮机工作站 Engineering
轮机系统工作站是轮机长在主轮机室使用的主系统状态显示器的一个简化复制版,包括了曲速推进系统、脉冲推进系统及相关子系统的页面。这一工作站的设置目的是为了让轮机长在舰桥上也能对轮机系统进行监督。在警戒情况下局势可能要求轮机长到舰桥值班、而又需要他/她紧密监视关键系统动态时,这一工作站就显得尤为重要。在大多数日常巡航模式运作情况下,舰桥对这些系统的监视则由飞行控制官和运作管理官分担。
工作站的常规界面配置为被动显示系统状态数据,但轮机长或其他高级军官可以使用其权限激活并对所有轮机系统进行完全控制。
工作站终端通过舰桥的专用光学数据网络总线与轮机系统相连接,此外还有专用的光纤硬线连接作为冗余措施,用于确保在主要控制系统故障的情况下,仍能通过备份线路对关键系统进行直接控制。在这种故障情况下,主计算机核心被认定为无法使用或不可靠,因此轮机工作站将通过舰桥轮机子处理器的支持对各系统直接进行手动控制。
在全能模式下,轮机工作站能够独立寻址和访问轮机与推进系统中的任意控制和伺服设备,以及控制软件程序,让轮机长即便在远程操作的情况下也拥有极大的操作灵活性,能够重构系统运作方式来应对突发情况。
轮机工作站通常无人值守,只有轮机长和其他关键轮机人员可以占用。不过其大多数显示都可以由运作官和舵手通过其操作程序时刻进行访问。
3.12 制导和导航 Guidance and Navigation
对于任何穿越恒星际空间飞行的飞船而言,制导与导航的概念都至关重要。这些概念指的是控制飞船运动、在三维或四维(即包含时间)尺度上精确定位特定点位、以及让飞船沿着这些点间的安全路径飞行的能力。进取号的任务区域涵盖了银河系中已知和未知的区域。尽管恒星际导航的问题早在两个多世纪前就已经被详细定义,但在银河系这个天体漩涡中导航,尤其是在曲速下,仍然需要船载计算机、传感器、主动高能偏导系统和船员决策能力的密切且精准的协作。
飞船制导 Spacecraft Guidance
进取号相对于周围空间的姿态和平移控制,需要碟部和轮机舰体上搭载的众多系统的协调来完成。当星舰在银河系内部进行机动时,主计算机会尝试以亚光速下最高 10 千米、曲速下最高 100 千米的精度持续计算并定位星舰的位置。速域的区别在这些情况下是至关重要的,因为在不同的飞行状态下将采用不同的传感与计算方法。在星系内进行极低速机动时,主计算机与 RCS 系统推力器交联,能够以 0.05 角秒的精度控制姿态定向、以单次推进 0.5 米/秒的精度控制平移机动。在末端对接操作时,精度可进一步提高至 2.75 厘米。星舰相对其质心改变飞行方向的角度以方位角来定义,在 条目 3.4.2 中有详述。
内部传感器设备,如加速度计、光学陀螺仪和速度矢量处理器,都被编入惯性基准输入系统(Inertial Baseline Input System , IBIS)中。IBIS 与 SIF 和 IDF 系统实时交联,后者负责提供补偿因子校准惯性传感器的船内表观读数,从而给出能够用于与外部测量值比对校准的惯性基准数据。IBIS 同时也提供一个连续计算的反馈回路,供 RCS 系统验证机动输入之用。
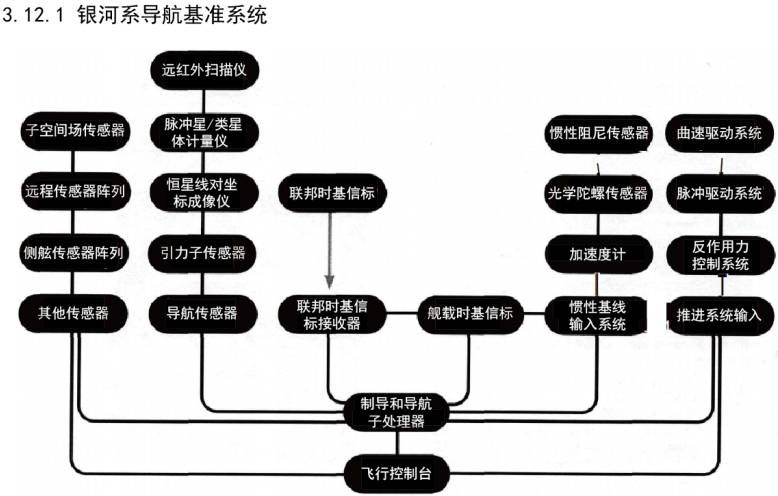

外部传感器 External Sensors
亚光速下使用的主要外部传感器包括恒星引力子探测器、恒星对坐标成像仪,脉冲星/类星体计数器,远红外巡天扫描仪,以及联邦时间基准信标(Federation Timebase Beacon , FTB)接收机。这些设备同样也与 SIF 和 IDF 系统处理器、内部惯性传感器和主计算机交联,经修正后获得对星舰当前位置的准确感知。外部传感器的广泛类型确保了其能够在不同的环境下均获得最大限度的可用读数。标准外部传感器平台在设计上就要求即便在不利运作条件下,也能完成粗略的定位计算工作,譬如在强磁场环境、高密度星际介质和恒星耀斑中时。
联邦时基信标运行在子空间频率上,主要用于星舰在曲速下计算自身位置。当然,亚光速下的星舰也可以使用其作为基准,获得更为精确的定位数据。在无法收到清晰信标导航基准信号的情况下,会由船载时间基准处理器和惯导系统继续进行时间与惯性基准的内部计算,并在重新收到信标后进行校准。
进取号在亚光速下的制导由上述导航系统与脉冲引擎系统交联来完成。外部传感器数据会在高亚光速下被相对论效应严重扭曲,因此需要经船载制导与导航(GNC)子处理器进行必要校准,才能对飞船的位置状态进行准确计算,并生成适当的脉冲引擎控制指令。联邦并不提倡在高亚光速下进行长时间飞行,因为钟慢效应的影响难以预测。仅在曲速推进系统由于种种原因不可用时,才可能让星舰进行高亚光速航行。
在银河级星舰上,制导与导航系统的持续研究任务由 12 只宽吻海豚(Tursiops truncatus)和樽鼻海豚(T. truncatus gilli)组成的混合咨询组负责,包括来自太平洋和大西洋的海豚。这支队伍由另外两只高屋虎鲸(Orcinus orca takayai)负责监管。所有关于导航的理论课题都由这些精英专家进行研究,并由星际舰队采纳它们对于系统改进的建议。
导航 Navigation
任何关于制导和导航的讨论都绕不开银河系的整体环境。银河系充斥着恒星、气体和尘埃团,以及大量奇异的(往往也是高能的)现象,分布在广袤的低密度太空中。进取号和其他联邦星舰的任务航段将带领她们接触这些飘浮在太空中的天体,而这一切都只有依赖于舰上导航系统才能得以实现。
银河系 The Milky Way Galaxy
无论使用什么测绘方式,对整个银河系的测绘工作似乎都是一场永不停歇地记录的噩梦,它被创造出来仿佛就是为了阻碍所有试图穿越它的人。整个银河系不仅仅是在旋转,而且还是从它的核心到外旋臂、都在以不同的速率旋转着。最终,随着时间的推移,即便最小尺度的结构变化都会变为足以影响导航和测绘的问题。然而,为了开展探索行动、确定贸易航线和完成从殖民地转运到救援在内的广泛星际舰队行动,某种程度上的通用参考基准无论如何都是必须的。当前联邦确定的银河系测绘和定向体系在图 3.4.1 和 条目 3.4.2 中有详细介绍。
行星上的深空巡天扫描和星舰的勘测活动所发现的天体将会被记录在星际舰队的中央银河状态数据库中。这个数据库记录了银河系中所有主要恒星、星云、尘埃云和其他稳定自然天体的位置与运动状态,并分发给联邦各部门使用。发现的新天体会在第一时间被编目,然后将数据库更新通过子空间无线电传送给星际舰队和其他联邦及盟友飞船。
星舰在联邦前哨站和星站停留期间,会将所有上一次靠港之后的详细飞行记录下载并上传给星际舰队。数据库中的大多数信息用于定义物体在当前时刻的状态,「当前」被定义为在地球旧金山星际舰队总部所测定的实时时钟时间。当然,由于光速限制,从地球或任何行星观察到的银河系表观状态都是不可靠的,因此需要通过大量其他附加手段(例如超光速的子空间数据)来确保数据库的准确。如果实时物体位置信息不可用,则会给出预测的状态数据。
小质量粒子的偏导 Deflection of Low-mass Particles
星舰飞行路径上的小质量物质,譬如星际介质和尘埃粒子,会由主航行偏导仪从飞行路径上扫开。在低亚光速航行下,主变流碟将投射出一组嵌套的抛物面偏导护盾,它们会对碰撞到的微小粒子施加径向速度,从而有效地将其从飞船前方清扫开来,在舰艏前方制造一段短暂的净空。更高的飞行速度将需要使用偏导束精确瞄准指向,直接将飞行路径上的物体移走。
偏导仪的输出功率控制可有多种模式调节,从简单的偏转到预测并自适应子空间/引力场变化。一系列高速算法将分析飞船的速度及前方星际介质的密度变化,从而向航行偏导仪系统发出调整指令。
3.13 系统诊断 System Diagnostics
进取号上的所有关键运作系统和子系统都有一系列预编程的自检诊断软件和程序,以便在发生实际或潜在的故障时使用。这些诊断协议通常分为五个不同的级别,每个级别提供需不同程度船员人工认证的自动化测试。在给定的情况下使用何种类型的诊断,通常取决于情况的危急程度以及留给测试程序的时间。
- 一级诊断:这是通常会在飞船系统上执行的最全面复杂的系统诊断类型。其会执行大量的自动化诊断程序,但一级诊断同时需要一组船员对系统机制和读数进行实际物理验证,而非完全依赖于自动化系统,从而避免自检软硬件可能出现的故障。主要系统上进行的一级诊断可能需要耗时数个小时,并且在许多情况下,下属系统都必须关闭下线直到全部测试完成。
- 二级诊断:这是一个相对全面的系统诊断协议,其像一级协议一样也包括大量的自动化诊断程序,但需要更少的船员人工认证操作。这一诊断的可靠性范围稍差一些,但所需要的时间只有更复杂的一级诊断的一半或更少。
- 三级诊断:这一协议类似一级和二级诊断,但船员只需要对关键机制和系统读数进行人工验证。由于省去了大量的人工测试操作,三级诊断通常可以在 10 分钟或更少的时间内完成。
- 四级诊断:这是通常用于怀疑某一系统出现故障情况下的自动诊断程序。其类似于五级诊断,但采用更复杂的自动诊断程序组。对大部分系统而言,四级诊断程序可在 30 秒之内完成。
- 五级诊断:这是一个用于例行检查认证系统功能的自检程序,通常运行一次只需要不超过 2.5 秒的时间。绝大多数系统每天至少都会运行一次五级诊断程序,在需要对时间和系统资源进行仔细调配管理的紧急情况下也会运行。
3.14 作战舰桥 Battle Bridge
除主舰桥之外,星舰还有一个次级运作控制设施,即作战舰桥。其位于 8 号甲板、轮机舰体最顶端,在舰碟分离模式下作为战术行动的指挥控制中心(详见 条目 15.8 )。作战舰桥配备了标准的操舵和运作工作站用于飞行操作,以及强化的战术分析、通讯、轮机和火控工作站。和其他控制设备一样,作战舰桥配备的软件定义工作站系统也可以通过重构配置来处理特定操作(详见 条目 11.5 )。
除了其战术用途之外,作战舰桥还可作为主舰桥的备份行使辅助控制中心职能。作战舰桥的计算机子处理器同样可以访问和控制所有主要舰船系统,并能在主舰桥完全失能、主计算机核心部分失效的情况下仍然执行其能力。
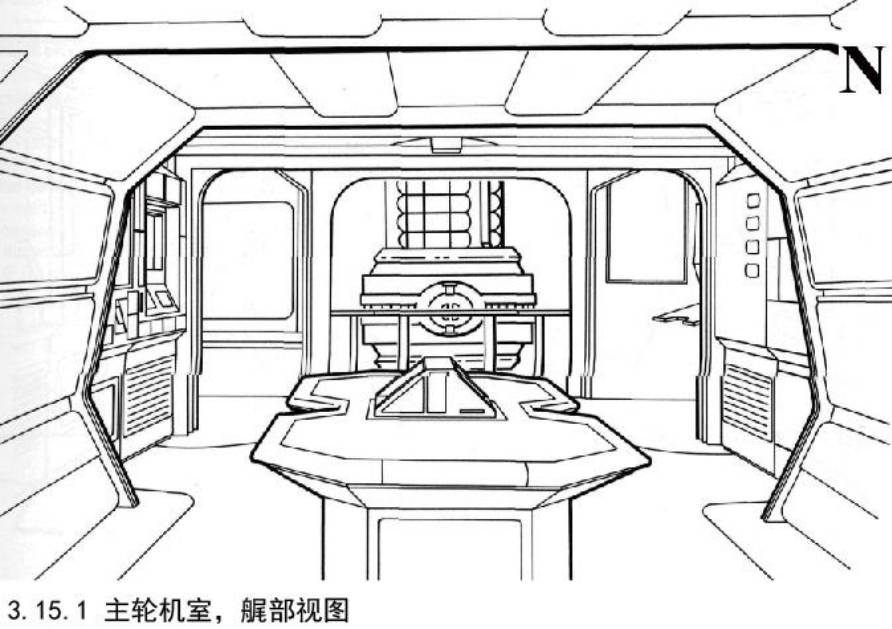
3.15 主轮机室 Main Engineering
主轮机室位于 36 号甲板,是飞船曲速推进系统及脉冲推进系统,以及其他轮机系统的总控中心。在主舰桥和作战舰桥失能的情况下,主轮机室也将作为后备控制中心。此时,其工作站可被重配置用于模拟操舵、运作、战术和其他舰桥操作的功能。实际上,主轮机室是执行这些关键操作的合适位置,因为其位于轮机舰体内部、靠近关键曲速推进系统组件,因此受到最大程度的保护。轮机室与其他关键主要系统间通过受保护的后备光学数据网络硬线连接。
主轮机室供轮机人员使用的主要控制台包括:
- 主系统显示器:这是一台大型桌面显示器,能够让当值工程师获得对全舰健康状况的总体感知。这一显示器还配有两个小型工作站,能够让其他轮机和工程人员进行特定操作任务,将较大的桌面显示器留作其他用途。在紧急情况下,控制台可被重配置用于进行有限度的飞控操作。
- 曲速推进系统状态显示屏:这是一块壁挂显示屏,显示曲速推进系统的简图,以及所有关键系统组件的性能状态。
- 脉冲推进系统状态显示屏:这是一块壁挂显示屏,显示脉冲推进系统的简图,以及所有关键系统组件的性能状态。
- 主态势监视器:这是一块大型壁挂显示屏,显示着星舰的剖面图,并示出关键系统和硬件的位置,同时将任何异常部件高亮显示。显示器还配备了两组用户控制界面,用于对故障进行定位。
- 轮机长办公室:这是位于轮机室旁的一间控制室,配备有主轮机室内大部分关键参数显示器的缩小复制版本,以及供轮机长和两位助理使用的工作站。其还配备有紧急损管控制工作站,也是主轮机室的主要等线性控制芯片插板的所在地。办公室的位置紧邻曲速核心的物质/反物质反应组件,强化光学观察窗让轮机长能够在不使用传感器数据的情况下,通过目视直接观察曲速核的反应状态。
- 当值工程师控制台:轮机长办公室旁设置有一个较小的工作站,供当值工程师使用。这一工作站配有主系统显示器的缩小显示面板。主轮机室紧邻物质/反物质反应室。为了安全起见,当主轮机室发生严重故障或等离子体泄漏时,配置的两扇隔离门可以关闭以保护主轮机室不受物质/反物质反应室核心部分的影响。这些隔离门可以被自动触发。还有一套力场系统提供进一步的保护,适用于曲速核心破裂或者类似意外事件发生时的情况(详见 条目 5.10 )。
作者注
主轮机室中间的桌面式主系统显示控制台实际上是卡特莱特上将和部下们在《星际迷航 IV:抢救未来》中在星际舰队司令部使用的同一台设备,只不过经过了翻修。大多数《星际迷航》的制作人员都把它戏称为「台球桌」。