10.0 科学与遥感系统 complete
索引
10.1 传感器系统 Sensor Systems
银河级星舰进取号 D 配备有有史以来为联邦星舰所设计过的最为复杂且具有任务弹性的传感器套件之一,使其成为星际舰队所建造过科学研究能力最强的飞船之一。
进取号上总共搭载有三个主要传感器系统。
其一是远程传感器,主要位于轮机舰体艏部。这套传感器包括一系列高能设备,设计用于沿着飞船的飞行路径扫描,采集导航与科学数据。
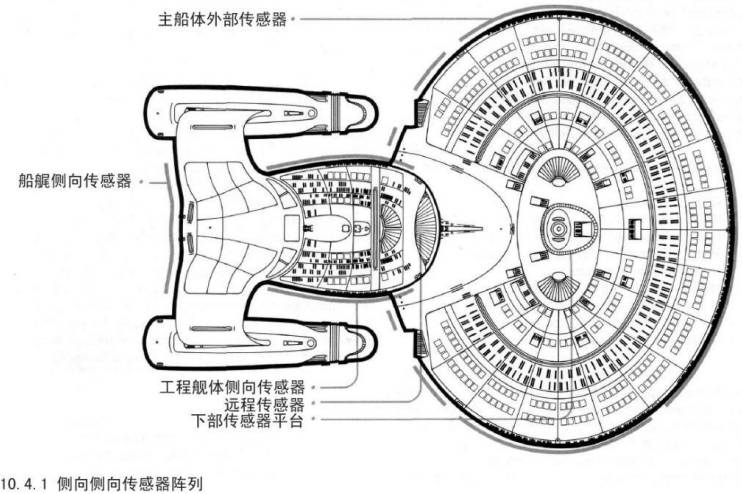
其二则是侧向传感器阵列。这套系统由分布在碟部及轮机舰体边缘、覆盖了艏艉和左右侧舷方向的传感器阵列组成。此外,在碟部顶部的 2 号和底部的 16 号甲板还分别拥有面向上及下方的较小补盲阵列,用于覆盖舰体边缘阵列无法覆盖的观测角度。
其三也是最后一组是导航传感器。这些专用传感器与飞船的飞控系统直连,用于测算飞船位置及速度。其由舰艏、左右舷背部、舰艉及腹部的传感器阵列组成。
此外,还有几组特殊用途或工程用途的传感器套件,譬如安装在飞船蒙皮上,用于测定子空间流通量的传感器。
这些传感器为银河级星舰和船员们提供的广泛功能范围包括:
- 天文观测。这包括光学和宽频段电磁扫描能力,能够在光年级别的范围内研究恒星和类星体,以及其他天体现象。其中的宽角度扫描能力可被用于自动星图测绘,此外还有一系列范围广泛且可独立控制的仪器用于任务特化的研究。
- 行星地表分析。一套大范围的近程传感器能够从行星轨道上进行详细的地图测绘和地质勘测。除用于测绘的高分辨率光学和电磁扫描之外,虚拟中微子光谱仪和短程夸克共振扫描仪还能提供详细的地质结构分析能力。
- 远距离生命形态分析。一组复杂的带电夸克团共振扫描仪阵列能提供跨越轨道距离的详细生物数据。通常情况下当与光学和化学分析传感器结合使用时,生命形态分析软件能由此推断生物形态的总体结构和其基本化学成分。
10.2 远程传感器 Long-Range Sensors
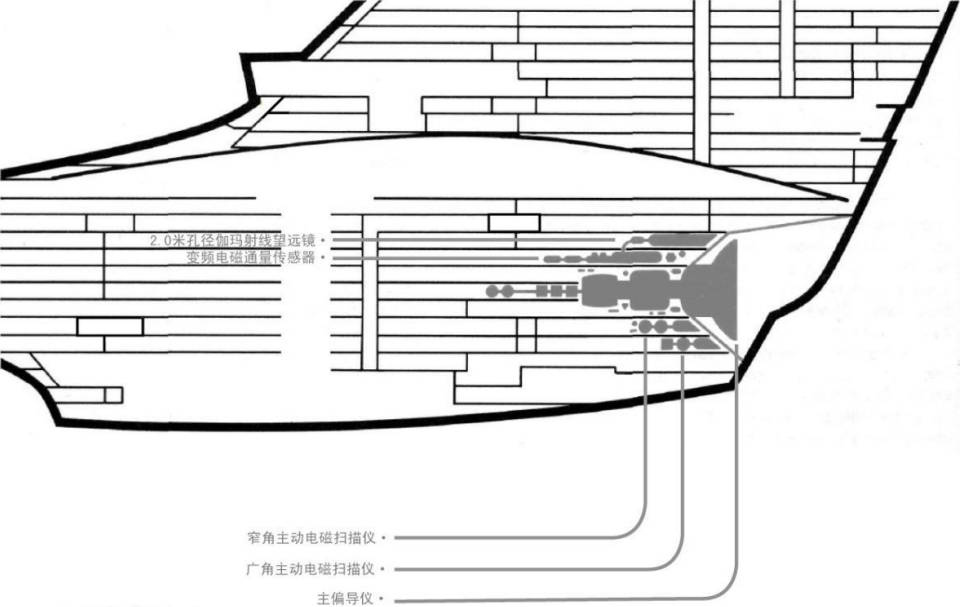
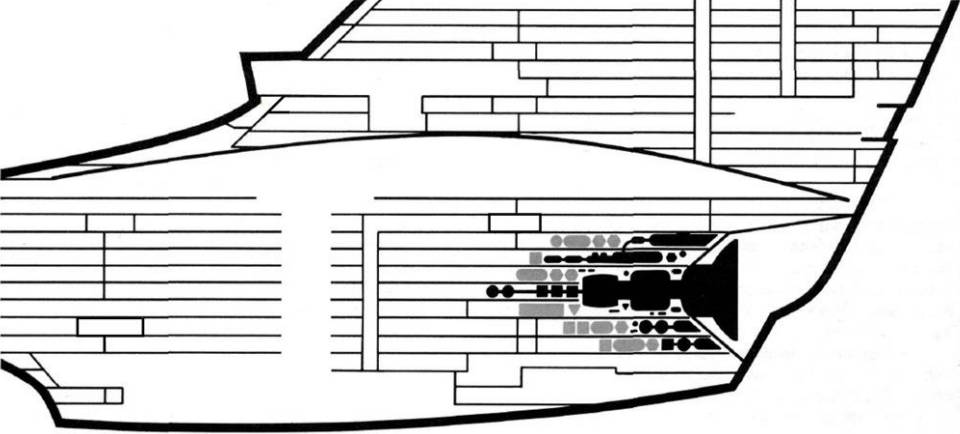
远程传感器阵列中的设备可能是进取号上功能最为强大的科学仪器组。这套高能主动与被动子空间射频传感器组件安装在轮机舰体舰艏,位于主偏导仪正后方。
远程传感器阵列中的大部分仪器都是主动扫描子空间设备,能以大大超过光速的速度收集信息。在高分辨率模式下,其最大探测距离约为 5 光年,在中低分辨率下则可达到约 17 光年(取决于设备类型)。在这一范围上,传感器的扫描脉冲以曲速 9.9997 的速度发射出去,大约需要花上 45 分钟才能到达目的地,然后又要花费 45 分钟才能回到进取号上被接收。标准扫描协议允许以这样的速度每天对大约一个相邻的星区进行全面研究。在一个太阳系的范围内,远程传感器阵列能提供几乎瞬时无延迟的信息。远程传感器阵列的主要仪器包括包括:
- 广角主动电磁扫描仪
- 窄角主动电磁扫描仪
- 2.0 米口径伽玛射线望远镜
- 变频电磁通量传感器
- 生命形态分析仪器组
- 参数化子空间场压力传感器
- 重力畸变扫描仪
- 被动中微子成像扫描仪
- 热成像阵列
这些仪器装在主偏导仪后 32-38 号甲板的 8 个仪器舱内。如被动中微子成像扫描仪这样的高功率仪器能够直接从主等离子电力系统导管接头获取电力。主偏导仪变流碟阵面上包括有刻意设计的穿孔电磁透波结构,以供传感器使用。尽管如此,当偏导仪以超过 55%额定功率运行时,子空间场压力传感器和重力畸变传感器将无法得到有效数据。正常情况下,在仪器舱内有 15 个安装点尚未分配,可被用于特定任务研究或未来拓展升级。所有仪器舱设备共用航行偏导仪位于甲板 34 的三个子空间场发生器来提供子空间通量势,从而以曲速传输传感器脉冲(见 条目 7.4 )。
10.2.1 远程传感器阵列
10.2.2 远程传感器处理器
远程传感器设计用来向前扫描飞行方向,常用来搜索可能危害飞行安全的物体,例如微流星或是其他碎片。这一操作通常是自动控制,并由飞行控制官管理。当远程传感器检测到小颗粒或是其他次要威胁物体时,便会自动指示主偏导仪将这些挡在前方的威胁物体从星舰飞行路径中扫除。扫描范围和偏转程度随飞船的速度而变化。当检测到大型物体时会自动微调飞行路径以避开可能的危险碰撞。在这种情况下,计算机会将情况通知飞行控制官,以便在可能的时候进行人工干预。
10.3 导航传感器 Navigational Sensors
地球上的鸟类能够通过感知周围环境,运用其感官周期性观察夜空中的星星来导航,从而从一点飞行到另一点。将进取号比作这样长途跋涉的鸟儿是恰当的。与这些鸟儿相同,舰上的计算机系统不断处理传入的传感器数据,并在每秒钟内执行数十亿次例行计算。虽然进取号上可与之相比的传感器和主计算机内部的模拟神经元及它们之间的互联网络数量比鸟类大脑低了许多个数量级,但这一系统仍然足以完成穿越银河系的任务。
传感器提供数据输入,主计算机中的导航处理器将不间断输入的数据脉冲处理为可用的位置和速度数据。在特定时刻被轮询访问的具体导航传感器系统将由当前的飞行状况而定。如果星舰在一个已知天体的轨道上运行,如在已知星系内的行星轨道上,则大部分远程传感器将被限制,而更倾向于使用近程传感器;如果星舰在恒星际空间巡航,则选择远程传感器,并将大部分近程传感器断电。这样,与生物一样,计算机不会被大量的感官刺激所淹没。
350 个导航传感器组件被设计成和其他通用传感器阵列的外部交联链路相隔离,从而为计算机提供了更为直接的脉冲电路,以利于快速处理。特别是在高曲速航行时,最微小的方向误差(哪怕仅有每光年百分之一角秒)都可能导致撞上一颗小行星,行星,甚至是恒星。在特定情况下,可能会创建特定的交叉连接以过滤掉主计算机标出的系统不一致。
每个标准导航传感器包括以下仪器:
- 类星体望远镜
- 广角红外源跟踪器
- 窄角红外/紫外/伽玛射线成像仪
- 被动子空间多信标接收机
- 恒星引力子探测器
- 高能带电粒子探测器
- 银河系等离子体波制图处理器
- 联邦时间基准信标接收机
- 恒星坐标对成像仪
主计算机中的导航系统以与当前相对银河系飞行的真速所自适应的数据速率来接收传感器输入。主计算机内用于保持超光速处理能力的子空间场将始终尝试保持至少比当前推进状态需求高 30%的算力,以确保安全的避撞裕度。如果超光速处理能力降低到对应推进状态的 120%以下,一般的飞行任务规则会要求相应的曲速推进功率降低以恢复安全水平。计算机内部的具体情况和因此导致的行动过程将决定实际程序,同时,在紧急情况和作战环境下,将遵循特殊的导航操作规程。
传感器输入数据的处理算法采用两种不同的形式,分别是基线代码和可重写代码。基线代码包括最新版的 3D 和 4D 位置与飞行运动软件,在星站大修期间安装。这种代码被刻录在受保护的计算机核心段存档中,能让星舰执行所有的常规飞行任务。自第一次离港以来,进取号已经历过三次完整的重装基线代码。可重写代码可通过多次修订的形式将基线代码翻译成符号语言,以适应新的场景,并允许主计算机创建自己的解决过程方式,或将其添加到已有的已验证解的数据库中。
这些经过验证的解决方案被认为是经过学习的行为和经验,并能方便地分享给星际舰队的其他飞船,作为整个航天器作为一个物种成熟过程的一部分。它们通常包括大量用于高曲速飞行的推测程序,计算机将程序预测的星际位置和实际观测所得进行对比,从而能够推导出新的数学公式。主内存最多可以同时驻留 1,024 个完整的可重写代码版本,或 12,665 条可转换代码段。可重写导航代码会在主要星站停留时下载或传输,乃至用物理方式转移到星际舰队进行分析。
专用于导航传感器的平台托盘,如同某些战术和推进系统一样,由于其对于星舰运行的重要性而需要比其他设备更频繁地进行预防性维护。正常情况下,其组件在刚达到 65-70%设计寿命的时候就会被换掉,从而给予部件维护更多时间,或是在由于任务条件或周期性的备件不足而导致必须顺延维护时有更大的安全裕度。有些传感器组件所用的材料稀有,或是需要较长的生产制造周期,如类星体望远镜(移频孔径窗口和光束合成聚焦阵列)与广角红外源跟踪器(薄膜低温液体再循环装置)以及银河系等离子体波制图仪(快速傅立叶变换子网络)。相比其他传感器备件储备量不低于 15%的警戒线,这些相对难以获得的仪器备件储量在可预见的未来还剩下 6%时是可被接受的。
10.4 侧向传感器阵列 Lateral Sensor Arrays
进取号配备了可被选用的最为广泛的传感器阵列设备。在星舰外部整合了许多大型传感器阵列,为仪器提供充足的空间和最佳的三轴视场覆盖。
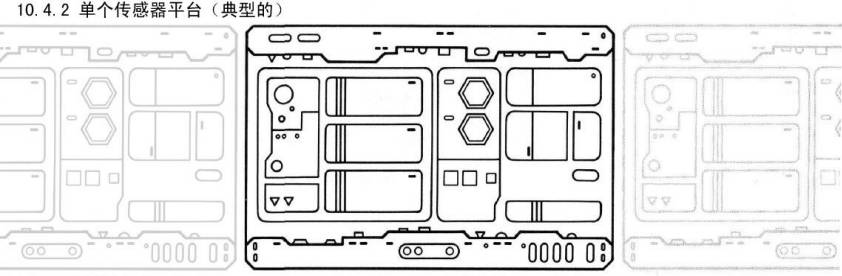
每个传感器阵列都是由一系列独立传感器平台所组成的一条连续长条结构。传感器平台是模块化设计,便于仪器设备的更换和更新。所有传感器平台中的三分之二被标准星际舰队科学传感器套件所占据,其余空间则可以用于其他任务载荷。每个传感器平台配有所需的微波电力供应、光学数据网络接口、低温冷却剂供应,以及设备的机械安装点。此外,还配有四套仪器定向伺服作动臂,以及两组数据子处理器计算机。
标准星际舰队科学传感器包由一套共六个平台组成,包括以下设备:
平台#1
广角电磁辐射成像扫描仪
夸克团分析计数器
Z 范围微粒光谱传感器
平台#2
高能质子光谱仪集群
重力扭曲成像扫描仪
平台#3
可操作生命形态分析仪组
平台#4
有源磁干涉扫描仪
低频电磁通量传感器
局部子空间场压力传感器
参量亚空间场压力传感器
氢过滤子空间通量扫描仪
线性校准子空间通量传感器
平台#5
可变波段光学成像仪集群
虚拟孔径引力子通量光谱仪
高分辨率引力子通量光谱仪
极低能引力子自旋极化仪
平台#6
被动成像伽马射线干涉传感器
低水平热成像传感器
固定角度伽玛频率计数器
虚粒子测绘相机
一个完整的星际舰队标准传感器套件包括如上 6 个标准传感器平台上的 24 套略有互相冗余的仪器设备。标准传感器共占用 144个平台,分布于碟部和轮机舰体侧向传感器阵列中。侧向传感器阵列可用的传感器平台总数则是 284 个。
上部和下部传感器平台分别位于碟部上下方,在极高和极低的垂直角度范围内提供覆盖视野。这些传感器阵列使用适当简配的星际舰队标准传感器套件。
作为标准星际舰队传感器套件的补充,任务所需的仪器设备往往可能是非标准件,它们可以被安装在 140 个非专用传感器平台上。如果这些非标准仪器较小,那么可以直接从舰内设置的维护通道进行安装。
较大的仪器设备则必须通过舱外活动进行安装,为此在靠近传感器阵列的位置设置了数个人员气闸舱。如果设备实在是过大,或是需要更换一或多个传感器平台,那么也可以使用穿梭机进行安装作业。
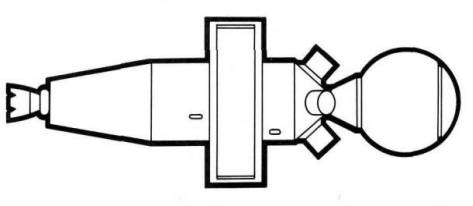
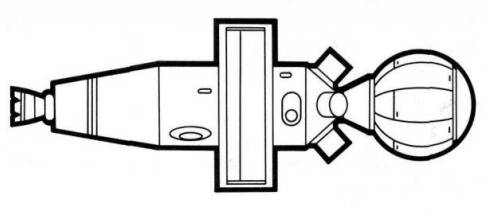
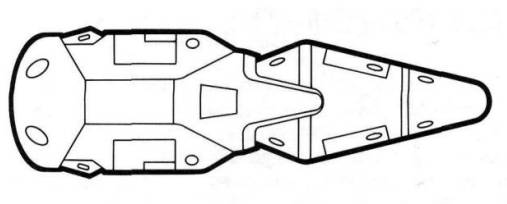
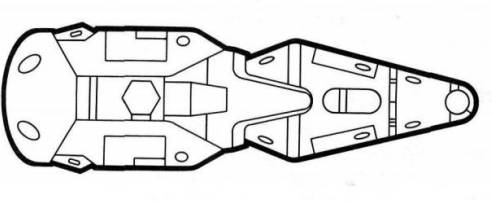
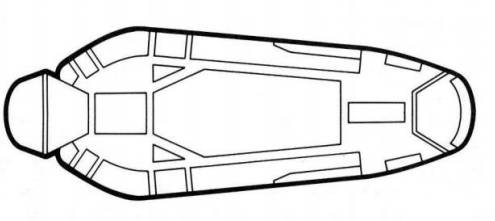
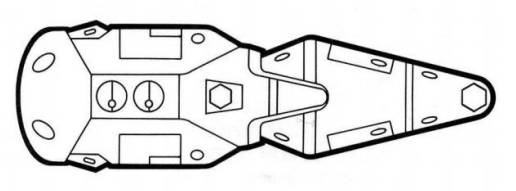
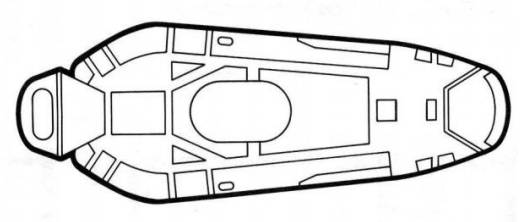
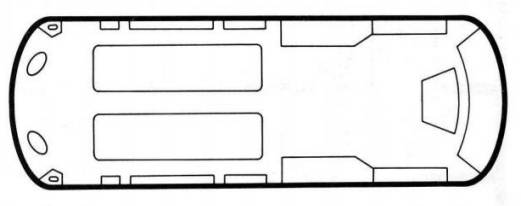
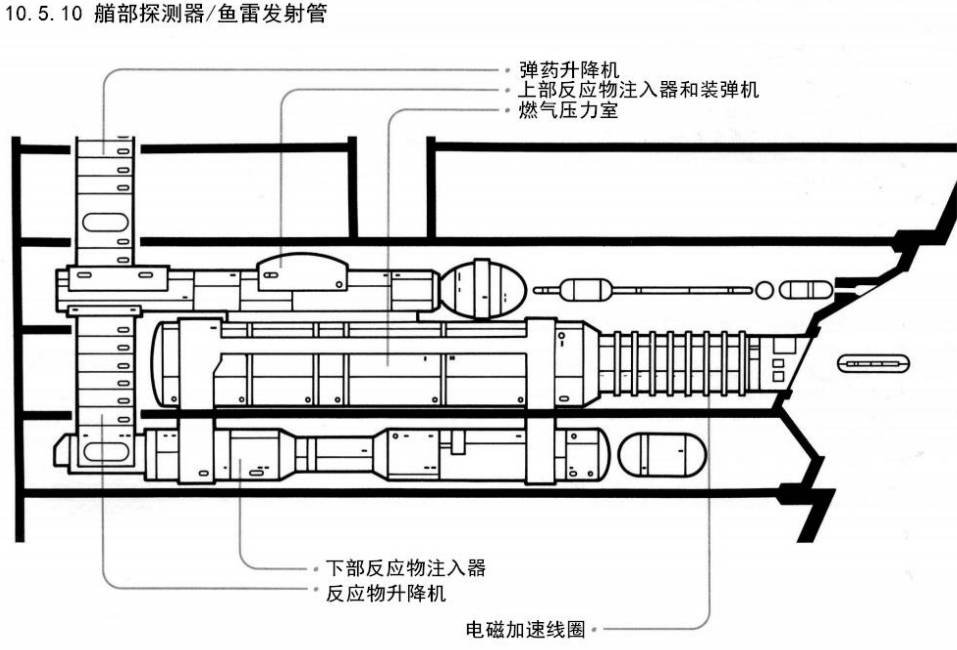
10.5 探测器 Instrumented Probes
通常情况下,对银河系中绝大多数天体和现象的详细勘测可由舰上传感器阵列来完成,但其最大能力会受到单个仪器的分辨率限制,或者无法采集到足够充分的信息,而需要借助外推算法来根据已有的读数进行组合推导。使用配备了仪器的探测飞行器对选定目标地点进行近距离研究将可以获得更高分辨率的数据,从而显著解决这一问题。
探测器通常被设计成可适配舰艏和舰艉鱼雷发射管发射的型号,以借助发射管的初速来更快飞抵目标。在此之外,还有三个更大级别的探测器不在下文之列,其实际上是利用穿梭机的机身拆除所有乘员和维生系统,并装入传感器和遥测设备改装成无人侦察机。
通用探测器 General Use Probes
小型探测器被分为九个等级,根据传感器类型、功率及性能水平来排列。所有九个型号探测器的壳体都使用伽马模压成型的三钛硬铀合金与压力键合 lufium boronate 制造,特定型号还配有三层透明铝制造的传感器窗口。不需要窗口的传感器则通过不同手段以共型阵方式整合在探测器壳体内部,包括将探测阵面沿着壳体外形弯曲,或是直接将元件整合在壳体结构内。
所有九个型号的探测器都配备了一套标准仪器套件,用于检测和分析所有常见的电磁和子空间波段、有机与无机化合物、大气成分和机械力学特性。所有探测器都能确保至少在有动力进入大气层的情况下存活,此外还有三个型号专门被设计用于长时间的大气内机动和软着陆。
很多探测器都具备不同程度的半遥控半自主操作能力,允许实时对探测器进行控制或引导。这样调查人员便可以留在进取号上,并通过探测器对可能存在危险的敌对或无法进入的恶劣环境进行探测。
下一节将列出每个型号探测器的性能。型号代号并不暗示其能力,而仅作为指挥人员在指令探测器发射时使用的代号。一般使用的、可随时备便发射的探测器与光子鱼雷战斗部装载区一同位于 25 号甲板上,而其他备用探测器则与鱼雷备弹一起存放在 26 号甲板的标准鱼雷转移托盘上。所有探测器都可供工程人员进行定检或在必要时对特殊任务应用进行改装。
1 级探测器
 航程:2 x 105 千米
航程:2 x 105 千米最大△v:0.5c
动力装置:微型氘聚变矢量推进器
传感器:用于空间应用的全频段电磁/子空间和星际化学传感器
遥测能力:12,500 个频道,12 兆瓦
2 级探测器(1 级改进型)
 航程:4 x 105 千米
航程:4 x 105 千米最大△v:0.5c
动力装置:微型氘聚变矢量推进器,增加额外的氘燃料储备
传感器:与 1 级相同,并增加了加强的远程粒子与场探测器和成像系统
遥测能力:15,650 个频道,20 兆瓦
3 级行星探测器
 航程:1.2 x 106 千米
航程:1.2 x 106 千米最大△v:0.65c
动力装置:微型氘聚变矢量推进器,增加额外的氘燃料储备
传感器:地表或气体巨星传感器平台,具备取样返回能力
遥测能力:13,250 个频道,15 兆瓦
附注:有限的 SIF 船体加强,能进行地表软着陆或扎入地表进行穿透探测;在执行气体巨星大气探测任务时可承受 450 大压压力;具有一定的地表机动时间。
4 级恒星接触探测器(3 级改进型)
 航程:3.5 x 106 千米
航程:3.5 x 106 千米最大△v:0.6c
动力装置:微型氘聚变矢量推进器,配有连续体驱动线圈组
传感器:三重冗余的恒星场和粒子探测器;恒星大气分析套件
遥测能力:9,780 个频道,65 兆瓦
附注:配备了六个可弹出并耐久存活的辐射通量子探测器,可被部署以研究非恒星能量现象。
5 级中程侦察探测器
 航程:4.3 x 1010 千米
航程:4.3 x 1010 千米最大△v:曲速 2
动力装置:双模态物质/反物质引擎,延长亚光速下续航,在曲速下有有限续航能力
传感器:拓展的被动数据收集和记录系统;全自主任务执行与返回系统
遥测能力:6,320 个频道,2.5 兆瓦
附注:具备行星大气再入和软着陆能力,喷涂隐身涂层并使用低可探测船体材料。可以被改装用于作战目的,此时能加装可按需配备的定制电子对抗套件。
6 级通讯中继器/紧急信标(3 级改进型)
 航程:4.3 x 1010 千米
航程:4.3 x 1010 千米最大△v:0.8c
动力装置:微型氘聚变引擎,带有高出力磁流体发电机
传感器:标准托盘
遥测能力:9,270 个信道的射频和子空间收发器,峰值功率 350 兆瓦;360 度全向天线覆盖,高增益天线定向精度 0.0001 角秒
附注:拓展氘燃料供应被用于无线电发射及行星轨道变平面机动。
7 级远程文明研究探测器(5 级改进型)
 航程:4.5 x 1010 千米
航程:4.5 x 1010 千米最大△v:曲速 1.5
动力装置:双模态物质/反物质引擎
传感器:被动数据收集系统与对应的子空间收发器
遥测能力:1,050 个频道,0.5 兆瓦
附注:适用于三级技术水平文明,喷涂隐身涂层并使用低可探测船体材料。最长停留时间为三个半月。配备有与防拆传感器相捆绑的低冲击分子自毁系统。
8 级中程多任务曲速探测器(改装自光子鱼雷弹体)
 航程:120 光年
航程:120 光年最大△v:曲速 9
动力装置:物质/反物质曲速场保持引擎,曲速 9 下续航 6.5 小时;配有为传感器和子空间收发器设置的磁流体发电机接头
传感器:标准托盘,可加装定制任务模块
遥测能力:4,550 个频道,300 兆瓦
附注:适用范围除星系级别粒子和场探测之外,还能承担预警侦察任务。
9 级远程多任务曲速探测器(改装自光子鱼雷弹体)
 航程:760 光年
航程:760 光年最大△v:曲速 9
力装置:物质/反物质曲速场保持引擎,曲速 9 下续航 12 小时;增加的燃料供应可在曲速 8 下巡航两周
传感器:标准托盘,可加装视任务而定的模块
遥测能力:6,500 个频道,230 兆瓦
附注:有限的有效载荷搭载能力;配有 3,400 千夸的等线性存储器;50 频道应答机。其典型应用是作为紧急日志/信息回收舱,会自动制导飞回最近的星站或已知星际舰队飞船位置。
10.6 三录仪 Tricorder
标准三录仪是一个便携式的探测、计算与通讯装置,由星际舰队研发部门(Starfleet R&D)开发并分发给星舰船员。其集成了在舰上和外勤任务中被认为最有用的科学仪器组的微缩版本,并可通过加装任务特定的外围设备来增强能力。其大部分功能通过触控来访问,在需要时也可以使用语音命令控制。
主要特性 Main Features
 标准的三录仪外形尺寸为 8.5×12×3 厘米,重 353 克。机身由微铣削的泡沫硬铀合金制成,机体分为两部分,中间由铰链连接起来,以便折叠起来便于携带。其控制界面由加固的正反馈按钮组和一个 2.4×3.6 厘米显示器构成。其采用与完全个人访问用显示设备相同的多层控制触摸屏,从而给予用户在组织命令和视觉信息方面的广泛偏好设定能力,同时简化的按钮布局提高了在外场使用的便利性。内部电子设备则设计用于在管理传感器数据、视觉图像和多信道通讯的上行、下行和记录等方面提供最大化的可用选项。
标准的三录仪外形尺寸为 8.5×12×3 厘米,重 353 克。机身由微铣削的泡沫硬铀合金制成,机体分为两部分,中间由铰链连接起来,以便折叠起来便于携带。其控制界面由加固的正反馈按钮组和一个 2.4×3.6 厘米显示器构成。其采用与完全个人访问用显示设备相同的多层控制触摸屏,从而给予用户在组织命令和视觉信息方面的广泛偏好设定能力,同时简化的按钮布局提高了在外场使用的便利性。内部电子设备则设计用于在管理传感器数据、视觉图像和多信道通讯的上行、下行和记录等方面提供最大化的可用选项。 三录仪的主要电子元件包括主电源回路、传感器组件、平行处理模块、显控界面、子空间通讯模块和多层内存储器单元。
三录仪使用一个可充电 sarium 晶体电池供电,在所有仪器工作情况下的续航时间为 18 小时。具体续航能力和耗电率由使用的子系统和仪器而定,并会持续计算并可供用户查看。系统典型功率为 15.48 瓦。
传感器组件包括 235 个机械、电磁和子空间设备,一部分安装在内部框架周围,另一部分则被整合进外壳成为保形设备。其中 115 个组件集中在前部用来获取前方定向读数,其探测视场下限为 1/4 度;其余 120 个组件为全向设备,用来测量周围空间。此外还有一个可以取出部署的手持传感器,配有 17 组高分辨率设备,用于在最窄视场可达 1 角分的窄范围内获取精细读数。在其视场范围限制内,主动和被动传感器扫描都可提供接近所探测过程所允许的电磁辐射理论极限的精度。通过整合不同传感器数据,三录仪的计算机处理器可以合成图像与数字读数并供船员操作。
标准三录仪的计算能力同样采用分布架构,分布在设备各处的子处理器连接到各种传感器和 27 个轮询主计算段(Polled Main Computing Segments, PMCS)。每个 PMCS 还包括有分别专用于传感器快速管理、任务处理优先度排序、数据存储路由和电源管理的子段。标准的 TR-580 和 TR-595H(P)型三录仪所配备的 PMCS 芯片可提供 1,500 亿次浮点计算每秒的额定计算力。
显控界面会将来自按钮和触摸屏的指令路由到 PMCS 以执行三录仪的功能。多种功能可以同时运行,只受 PMCS 的速度限制。在实际应用中,船员们通常不会同时运行超过 6 个独立扫描任务。
 三录仪的通讯功能通过标准子空间收发器组件实现,语音和数据在标准通讯器频率上上/下行。数据传输速率是可变的,在紧急数据转移模式下最高速度为 825TFP。和星舰之间的最大通讯距离限制为 40,000 千米,与标准通讯徽章类似。
三录仪的通讯功能通过标准子空间收发器组件实现,语音和数据在标准通讯器频率上上/下行。数据传输速率是可变的,在紧急数据转移模式下最高速度为 825TFP。和星舰之间的最大通讯距离限制为 40,000 千米,与标准通讯徽章类似。 标准三录仪的数据储存部分包括 14 个容量为 0.73 千夸的镍 carbonitrium 晶体芯片数据暂存器,以及 3 个每个容量 2.06 千夸的内建等线性光学芯片,总容量为 6.91 千夸。每个可插拔数据库晶体芯片在格式化后能容纳 4.5 千夸数据。在紧急转存模式中,所有储存设备,包括数据库芯片在内,都会被按顺序读取并转移数据。在实际应用中将标准三录仪的所有内存数据转存到星舰上平均耗时 0.875 秒。
控制和指示的一般描述 General Description of Controls and Indicators
三录仪折叠状态时,唯一露出的控制部分只有电源开关。电源开关通过一个红色指示灯指示设备是否启动,还有一个绿灯显示剩余电池容量。在翻开之后就可以看到所有控制界面。
- PWR STBY — 电源待机指示灯。如果三录仪未使用超过 10 分钟,此指示灯将点亮,三录仪自动进入低功耗模式。任何新的触控动作都能唤醒设备恢复到全功率。当三录仪被搁置但正在执行任务时,则不会触发低功耗模式。
- F1/F2 — 控制功能选择开关。大多数三录仪按钮都有多个功能,这个按钮是一个可被船员自定义编程的方便功能键,用于经常且重复性的功能切换。F1/F2 仅在数据操作期间激活。
- I 和 E —这两个控制按钮负责管理传感器信息来源:三录仪本身(内部,I)、远程设备(外部,E)或同时两个来源。远程设备可以是使用相同机器语言的其他任何传感器平台。「平台」通常指的是地面或飞行载具,包括进取号或其他飞行器。
- 显示屏 — 此屏幕能显示任何实时、储存或是计算的影像。显示区域的结构和功能类似星际舰队的控制面板与显示屏,但分层技术被简化,显示面积也更小。图像的特定区域可以通过触摸放大;许多其他功能可以使用标准三录仪预存的设置程序进行自定义。
- LIBRARY A/B — 标准三录仪包括了一个读写驱动器,用于将信息记录在小型晶体记忆芯片(即前述的数据库芯片)上,以便日后检索或是加载芯片中之前记录的数据。每个芯片最大容量为 4.5 千夸。
- ALPHA BETA DELTA GAMMA — 这四个指示灯表示数据记录或检索活动所在的三录仪数据库分区。更详细的显示与数据操作可以在显示屏上调取。
- DEVICE INPUT — 这三个键中的任意一个都可被分配用于管理多达 9 个远程输入设备,因此总共可有 27 个可用的不同信息源输入。对于常规的外勤任务,默认设置为 GEO、MET 和 BIO,代表地质、气象、生物。
- COMM TRANSMISSION — 这一区域的按键控制通过子空间收发器进行的三录仪数据上下行传输。ACCEPT 用于接收来自 一个指定远程来源的定向单行传输,POOL 允许三录仪与一个或多个指定的远程信息源联网。INTERSHIP 则设定一个专用的三录仪对舰通讯链路,可使用多个高容量信道来进行传输。TRICORDER 按键则会设定一个类似的高容量链路,但是连接的是其他三录仪。所有四种模式理论上可被同时激活,但这种情况下系统运行速度将显著减慢。实际操作中一般最多只会用到两种模式。
- EMRG — 这是紧急情况下用来「把所有东西倒回母舰」的按钮,提供不校验纠错的数据爆传输用于突发情况。实际操作中, 在标准三录仪的主电源被耗尽之前这一操作最多只能使用两次。在激活时,所有传感器任务全部暂停,所有电力被用于子空间收发器,使其发射功率最大化。
- IMAGE RECORD —本区管理标准三录仪记录的单帧或连续图像文件。有 4 个控制键,分别是 FORWARD(前进)、REVERSE(倒放)、INPUT(写入)、ERASE(擦除)。当与其他三录仪功能配合使用时,可完成一个相对完整的外勤任务记录文档。在标准成像分辨率下,以 120AVC/秒的帧率记录时,三录仪总共可存储 4.5 小时的连续影像。帧率和分辨率越高时,可记录时间也会相应缩短。
- LIBRARY B — 数据库 B 的芯片主要用来存放连续影像,但存储配置也可能被改为包括其他储存区,具体取决于应用。I 和 E键控制图像来源。
- ID — 这个触控板可以自定义三录仪的默认启动设置,也能作为单人操作时的安全设备。
作者注
盖茨·麦克法登(贝弗利医生的饰演者)一直坚持希望医疗程序尽可能准确。在她要求给予我们的道具一套一致统一的标准操作程序之后,里克编写了这篇三录仪的介绍。
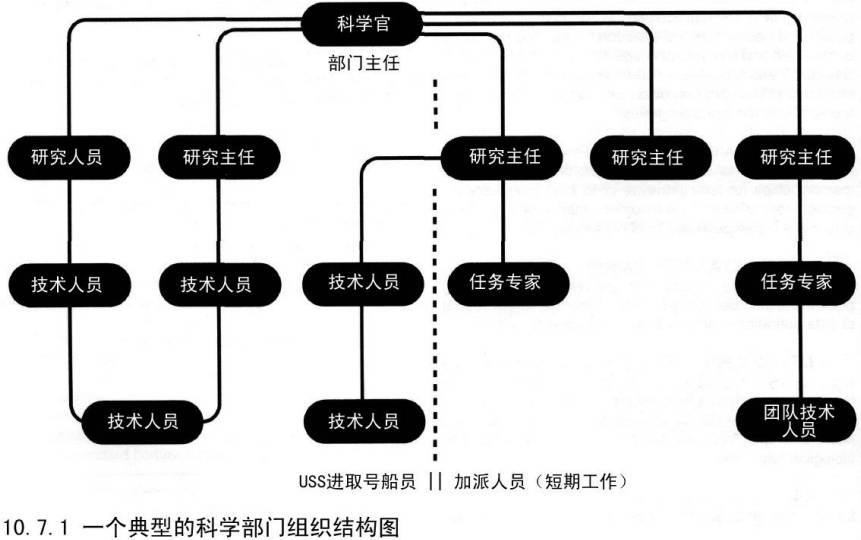
10.7 科学部门运作 Science Department Ops
进取号能够支持数支科研团队,他们往往被派遣到舰上,并利用星舰作为机动科研平台的优势,覆盖尽可能大的研究空间范围。这些次级研究任务往往包括恒星绘图与观测、行星勘测、星际介质研究,以及文化和生命研究。
虽然这些次级任务小组通常而言应当将他们的工作聚焦在主要任务地点附近的恒星和行星上,但进取号的广泛作业范围仍使其成为研究大量天体的一个非常好的机会。与其他研究团队一样,次级研究项目通常由星际舰队研究人员或附属大学和工业界的科学家设计,并分配到进取号上执行短期或持续性任务。
拓展任务构型的银河级星舰包括了可支持约 20 个专门的任务小组的拓展设施,具体数字取决于小组规模及任务类型。这些设施包括最多可容纳 225 人的居住设施,以及可根据特定研究人员需求进行配置的非专用实验室和工作空间。此外,侧向传感器阵列上有约 40 个平台被分配用于特定任务所需的仪器设备,可按需安装和改造。同样的,在远程传感器阵列中也有约 15 个空位可被用于特定任务调查。
每个部门或小组对自己的观测和实验任务负责。由于主要任务需求在定义上优先于次要任务调查,因此这些小组在行动中必须保持足够的灵活性。尽管如此,每个部门或小组仍应当定期向运作官或科学官提供任务需求信息,这样每日任务程序就能被设计成满足尽可能多的部门需求。
作者注
我们的道具主管乔·隆戈和阿兰·西姆斯,以及助手查理·罗素,负责制作剧中出现的这些新奇的手持科学工具。它们大多数都是由里克设计的,但有一件不是,就是在「 Pen Pals 」中出现的光谱分析仪。《天生爱神》的粉丝们可能一下子就会认出来,这玩意就是还在躲避邪恶红色力克罗伊人魔爪的震荡翻转仪——没错,是同一件道具。ST 中的另一个《天生爱神》neta 则是 ST6 里精进号舰桥铭牌上的舰铭:「无论你去向何方,你都在那里。」